Raspberry PI , SOCs
- Raspberry - Systeme
- Raspberry Pi als PXE-Server
- Raspi-Cam-- SSH-Tunnel--div
- Anpassung PI-Hole
- Docker auf dem Raspberry
- Setup a Raspberry Pi Zero W to run a Web Browser in Kiosk Mode
- Zerocam
- Raspberry-Hardware
- Orange PI 2
- Banana Pi BPI-M2 Berry
- Bananan Pi M2 Zero
- Bananpi Pi M1
Raspberry - Systeme
Softwarelösungen
Raspberry Pi als PXE-Server

© Erik Reis, 123RF
Booten übers Netz
Via PXE booten oder installieren Sie auch auf Rechnern ohne Wechselspeicher ein Betriebssystem. Mit dem Raspberry Pi steht Ihnen dafür ein sehr kostengünstiger Server zur Verfügung.
README
PXE erlaubt es, bootbare ISO-Images im Netz bereitzustellen und diese auf den Client-Rechnern zu starten. Der Artikel zeigt Ihnen, wie Sie den RasPi zum PXE-Server aufrüsten.
Anfang 1999 schlug Intel der Internet Engineering Task Force die Gründung einer Arbeitsgruppe vor, die ein Verfahren zum Booten eines Rechners vom Netzwerk über DHCP definieren sollte. Als technische Grundlage dazu präsentierte Intel seine PXE-Technik. Nachdem diese Arbeitsgruppe nicht zustande kam, veröffentlichte Intel im September 1999 im Alleingang die PXE-Spezifikation, die ursprünglich nur für die 32-Bit-Intel-Architektur (IA32) galt. Innerhalb von UEFI wird sie mittlerweile auch für IA64 unterstützt, daneben brachten entsprechende Portierungen PXE mittlerweile auch auf eine Reihe anderer Hardware-Plattformen.
Der PXE-Code befindet sich in einem ROM auf dem Client-Rechner (BIOS oder UEFI). Über eine Reihe von Anfragen an den Server ermittelt der Client dessen IP-Adresse und die zu ladende Startdatei. Letztere, die der Rechner über einen vereinfachten FTP-Transfer beim Server abholt (Abbildung 1), übernimmt dann die weitere Steuerung. Die exakte Vorgehensweise führt die PXE-Spezifikation [1] auf.
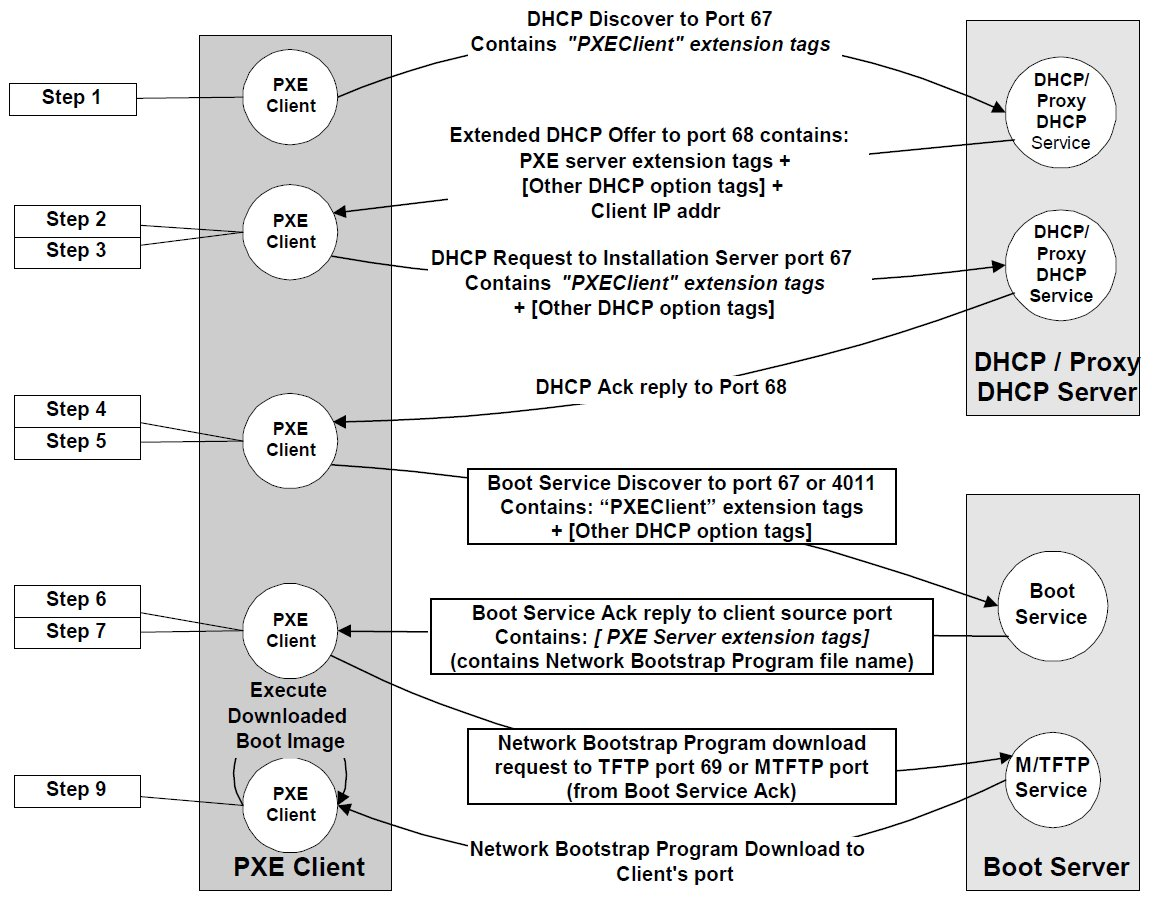
Abbildung 1: Der Boot-Vorgang via PXE im Diagramm. (Quelle: Intel)
DHCP PXE-fähig machen
Auf der Server-Seite, also auf dem Raspberry Pi, benötigen Sie als Grundlage einen installierten und konfigurierten DHCP-Server [2]. Mit dem Zuweisen der IP-Adresse übermittelt dieser DHCP-Server, wo sich ein Boot-Image befindet. Dazu muss auf dem Server ein TFTP-Dienst laufen, der diese Datei zum Client überträgt.
Die DHCP-Konfiguration benötigt nur eine kleine Modifikation, um PXE-Boot zu unterstützen: Im Abschnitt subnet der /etc/dhcp/dhcpd.conf geben Sie den Hostnamen des TFTP-Servers (in unserem Beispiel pi.homenet.de) sowie den Namen der Boot-Image-Datei an (Listing 1). Nach dieser Konfigurationsänderung starten Sie den Server mit dem Befehl sudo service isc-dhcp-server restart neu.
Listing 1
[...] # # add PXE-Boot support # next-server pi.homenet.de; filename "pxelinux.0"; }
TFTP
Damit der RasPi in der Lage ist, das Image und die Konfigurationsdatei auszuliefern, installieren Sie zunächst mit dem Kommando sudo apt-get install tftpd-hpa den TFTP-Server darauf. Der TFTP-Server erwartet in der Voreinstellung einen IPv6-Socket, was zunächst zu einer Fehlermeldung führt. Um dies abzustellen, ergänzen Sie in der Datei /etc/default/tftpd-hpa die Zeile TFTP_OPTIONS am Schluss um den Eintrag --ipv4:
TFTP_OPTIONS="--secure --ipv4"
Nach dieser Änderung startet der TFTP-Dienst ohne weitere Fehlermeldungen.
Syslinux
Um an die Datei pxelinux.0 (und einige weitere) zu gelangen, gilt es, das Syslinux-Paket auf dem Raspberry Pi zu installieren. Danach kopieren Sie die benötigten Dateien an den richtigen Ort (Listing 2)
Listing 2
$ sudo apt-get install syslinux-common $ sudo cp /usr/lib/syslinux/chain.c32 /usr/lib/syslinux/menu.c32 /usr/lib/syslinux/vesamenu.c32 /usr/lib/syslinux/pxelinux.0 /srv/tftp/ $ sudo mkdir --p /srv/tftp/pxelinux.cfg
Danach erstellen Sie eine recht einfach gehaltene Isolinux-Menüdatei /srv/tfpt/pxelinux.cfg/default, die lediglich die Optionen Von Festplatte starten und Speichertest als Boot-Optionen anbietet (Listing 3).
Listing 3
DEFAULT vesamenu.c32 PROMPT 0 TIMEOUT 300 MENU TITLE PXE Network Boot Menu LABEL local MENU LABEL Von Festplatte starten MENU DEFAULT LOCALBOOT 0 LABEL memtest MENU LABEL Speichertest mit memtest86+ v4.20 KERNEL memtest
Bootet ein Rechner übers Netz mit dieser Konfiguration, zeigt er einen entsprechenden Bootscreen an (Abbildung 2). Klappt das soweit, können Sie nun weitere Betriebssystem-Images auf den RasPi laden und in die Startdatei eintragen.

Abbildung 2: Findet Ihr Client-Rechner im Netz via PXE die nötigen Start-Dateien, zeigt er einen entsprechenden Bootscreen an.
PXE-Client einrichten
Aufseiten des Clients müssen Sie für das Booten über PXE lediglich die BIOS-Einstellungen entsprechend anpassen, was eventuell ein manuelles Aktivieren des Boot-RAMs der Netzwerkkarte voraussetzt. Nach der Umstellung startet der Rechner dann dauerhaft via PXE.
Viele Rechner bieten daneben beim Hochfahren auch auf Tastendruck ein Menü für die Auswahl des Bootmediums an, sodass Sie auf diesem Weg gezielt im Einzelfall via PXE booten können. Dell und IBM verwenden dazu in der Regel [F12], Asus nutzt [F8], und HP legt die Funktion meist auf [F9].
MSDOS-ISO booten
Für erste Versuche mit einem bootbaren Betriebssystem-Images eignet sich das kompakte, nur 3 MByte große MSDOS-Bootdisk bestens. Sie finden ein entsprechendes ISO-Image beispielsweise bei Allbootdisks.com [3], laden es dort herunter und kopieren es dann nach /srv/tftp/DOS/.
Mithilfe des kleinen Programms Memdisk lädt der Rechner ISO-Images in den Speicher und startet diese von dort. Sie finden das Tool unter /usr/lib/syslinux/memdisk und kopieren es von dort aus nach /srv/tftp/memdisk. Nun fehlt nur noch ein korrespondierender Eintrag in der Menüdatei /srv/tfpt/pxelinux.cfg/default, um den Clients das MSDOS-Image zum Booten anzubieten (Listing 4).
Listing 4
[...] LABEL MSDOS 6.22 MENU LABEL MSDOS 6.22 starten KERNEL memdisk APPEND iso raw initrd=DOS/DOS6.22_bootdisk.iso
Aktivieren Sie beim Start des Clients den entsprechenden Eintrag am Boot-Prompt, startet DOS 6.22 auf dem Rechner übers Netz.
Ausblick
Auf dem gezeigten Weg lassen sich auch etliche Linux-Distributionen via PXE booten, jedoch bei Weitem nicht alle. In vielen Fällen ist es notwendig, das ISO-Image als Network Block Device einzubinden und das ISO über die aus dem Image extrahierte initiale RAM-Disk zu starten. Wie das funktioniert, zeigt ein Artikel in einer der nächsten Ausgaben von Raspberry Pi Geek.
Glossar
- PXE
-
Preboot Execution Environment. Eine Methode zum Booten eines Rechners vom Netzwerk über DHCP. PXE nutzt neben DHCP auch noch die Protokolle UDP und TFTP.
- UEFI
-
Unified Extensible Firmware Interface. Dieser BIOS-Ersatz basiert auf dem ursprünglich von Intel entwickelten EFI, wird aber mittlerweile von einer ganzen Reihe von PC- und BIOS-Herstellern unterstützt, daher das “Unified”.
Infos
- PXE-Spezifikationen: http://download.intel.com/design/archives/wfm/downloads/pxespec.pdf
- DHCP-Server einrichten: https://wiki.debian.org/de/DHCP_Server
- MSDOS-Boot-Image: http://www.allbootdisks.com/download/iso.html
Raspi-Cam-- SSH-Tunnel--div
SSH-Tunnel raspimc: (root crontab)
@reboot sleep 20 &&/usr/bin/mount_all
@reboot autossh -M 0 -f -o ConnectTimeout=10 -o ServerAliveInterval=60 -o ServerAliveCountMax=2 -p 48153 -N -R 8081:localhost:22 root@meet.wkmimnl.de
@reboot autossh -M 0 -f -o ConnectTimeout=10 -o ServerAliveInterval=60 -o ServerAliveCountMax=2 -p 48153 -N -R 8082:localhost:8080 root@meet.wkmimnl.de
@reboot autossh -M 0 -f -o ConnectTimeout=10 -o ServerAliveInterval=60 -o ServerAliveCountMax=2 -p 48153 -N -R 8083:localhost:6875 root@meet.wkmimnl.de
Images auf SD schreiben - von SD ertstellen:
$ dd if=/dev/sdc of=raspbian.img bs=1M $ dd if=raspbian.img of=/dev/sdc bs=1M $ sync
Anpassung PI-Hole
Zwei Dateien sind zu editieren:
Feste IP: /etc/dhcpcd.conf
#Fixe IP
static ip_address=192.168.xxx.xxx/24
static routers=192.168.x.x
static domain_name_servers=127.0.0.1 8.8.8.8
IP-Einträge anpassen.
Wlan: /etc/wpa_supplicant/wpa_supplicant.conf
ctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev
update_config=1
network={
ssid="SSID"
psk=############wlan-schlüssel
}
Einträge anpassen.
Docker auf dem Raspberry
Dies ist Beitrag 1 von 2 der Serie “Raspberry Pi Docker Basics”
In dieser Serie lernst du den Umgang mit Docker Containern auf dem Raspberry Pi
In diesem Beitrag lernst du alle Grundlagen der Containerization mit Docker auf dem Raspberry Pi.
Bei Docker handelt es sich um eine noch recht neue Visualisierungstechnologie, die bei vielen großen Unternehmen mittlerweile zum Einsatz kommt. Ich möchte dir in dieser Serie zunächst die Grundlagen von Docker erklären, wie du einfache Anwendungen wie z.B. Heimdall installierst und später dann einen DNS-Filter wie Pi-hole oder AdGuard einrichtest, einen eigenen VPN-Tunnel mit wireguard aufbaust und/oder einen eigenen lokalen GitHub-Klon Gogs und Jira-Alternative Redmine einrichtest. Dadurch lernst du Stück für Stück Docker und seine Eigenarten, sowie Portainer zur Administration von Docker kennen.
INHALTSVERZEICHNIS
Die Hardware für diesem Blog
Vom Prinzip kannst du jeden Raspberry Pi nehmen. Solltest du noch keinen Raspberry Pi besitzen, dann schau dir einmal den Raspberry Pi 400 als Kit an und bestelle auch gleich einen ausreichend großen USB-Stick dazu. Es sollte aber zumindest ein Raspberry Pi 3, besser noch ein 4er mit mindestens 4GB RAM sein.
Was unterscheidet Docker von einer virtuellen Maschine
Wenn man etwas über Docker liest, kommt man schnell an den Punkt, wo der Vergleiche zu virtuellen Maschinen aufgezeigt wird. Vom Prinzip verfolgen beide ein ähnliches Prinzip, eine Anwendung möglichst isoliert bereitzustellen.
Als erstes möchte ich dir zeigen, wie sich eine virtuelle Maschine von Docker in ihrer Architektur im Wesentlichen unterscheidet, siehe Abbildung 1.
Das Prinzip der virtuellen Maschine liegt darin, dass Software einen kompletten PC, mit all seiner Hardware emuliert. Die Applikation läuft auf dem Betriebssystem der virtuellen Maschine und ist über diese erreichbar. Problem dabei ist, dass eine virtuelle Maschine enorm hardwarehungrig ist. Meist werden zur Bereitstellung von virtuellen Maschinen, kurz VMs, Serverracks eingesetzt, die in Ihrer Hardware skalierbar sind.
Docker arbeitet da ein bisschen anders. Docker stellt Applikationen in einem Container bzw. durch das Image bereit, welches nur die nötigen Bibliotheken und Programme zur Nutzung der Applikation enthält. Man spricht hier auch von Microservice-Architecture. Dadurch sind die Images extrem klein im Vergleich zu VMs und das Starten, Stoppen und Neustarten der Applikation geht schneller als bei einer VM. Nachteil ist aber, dass Docker den Kernel vom Hostsystem nutzt, was eine VM wiederum nicht macht. Wird also ein Docker-System kompromittiert, können alle Docker-Container kompromittiert werden. Durch die Docker-Images ist es ohne große Probleme möglich, eine Applikation auf jedem beliebigen System auszuführen, was bei einer VM meist schwieriger ist.
Die Frage, wo Docker und eine VM läuft ist schnell geklärt. Ein Docker oder ein VM kann im Prinzip auf jedem System laufen. Gerade bei einer VM ist aber Power gefragt, weswegen auf einem Raspberry Pi eine VM nicht laufen wird. Docker hingegen läuft auf einem Raspberry Pi, jedoch sollte man sich die Frage stellen, ob es klug ist für z.B. ein Produktivsystem Docker tatsächlich einsetzen zu wollen. Privat nutze ich Docker in Kombination mit diversen Applikationen, jedoch gibt es viele Images, die nicht auf den Raspberry Pi ausgelegt sind. Dazu später mehr.
Die Frage, ob man nun lieber Docker oder eine VM nutzen sollte, liegt ganz im Anwendungsbereich! Generell kann Docker eine VM nicht ersetzen und umgekehrt.
Kurze Einführung in die Begriffe / Docker Raspberry Pi
Wenn du mit dem Thema Docker anfängst, wirst du wahrscheinlich schnell mit Begriffen wie Docker-Container, Docker-Image, Docker-Volumen, Bind und vielen mehr konfrontiert. Ich möchte dir an dieser Stelle den Einstieg einfach machen und die wichtigsten Grundbegriffe schon einmal vorab erklären. Wen es ins Detail geht, werde ich das in diesem und allen weiteren Blogabschnitten erklären.
Was ist ein Docker? Streng genommen ist Docker, wie du es ja schon gelesen hast, eine Methode, um eine Applikation zu virtualisieren. Damit das funktioniert, brauchst du ein sogenannten Docker-Container, welcher wiederum aus einem Docker-Image erzeugt wird. Um es einmal einfacher zu erklären, kannst du dir ein Image wie eine DVD vorstellen. Die Daten sind fest auf der DVD bzw. dem Docker-Image hinterlegt und du kannst diese erst einmal nicht modifizieren. Diese DVD legst du in ein DVD-Laufwerk, welches die Daten ausliest und bereitstellt.
Das wäre in dieser Analogie der Docker-Container. Damit ist auch geklärt, warum man öfters liest, dass Daten in einem Docker-Container flüchtig sind bzw. ein Docker-Container vergisst. Stoppe ich den Container oder starte diesen neu, werden alle Daten resettet und du bekommst den ursprünglichen Zustand von dem Docker-Image präsentiert. Damit genau das nicht passiert, kannst du Daten auch in ein Volumen oder ein Bind, ein spezieller Ordner auf dem Hostsystem, auslagern. Dieses Volumen oder Bind musst du dann in den Docker-Container mounten, weswegen der Docker-Container genau diese Daten nutzt, um weiterzuarbeiten.
In der Regel wird bei Starten des Containers geprüft, ob das Volumen oder Bind schon nutzbare Daten hat und wenn nicht, werden Default-Daten angelegt, die dann ebenfalls nach einem Neustart weiterhin vorhanden sind. Welche Pfade du in ein Volumen oder Bind auslagern musst, verrät dir die docker hub – Seite der Applikation. Dann gibt es noch die Enviorments, was vom Prinzip Parameter sind, die ein Docker-Image zwingend braucht. Diese Enviorments können bei einem Image vorhanden sein, müssen es aber nicht. Ob und welche es gibt, bzw. was ihre Funktion ist, findest du bei docker hub meist in der Beschreibung. Damit die Docker-Container mit der Außenwelt kommunizieren können, z.B. eine Datenbank oder eine Webappilkation, musst du die Ports zwischen Host und Docker-Container verknüpfen. Das Interessante dabei ist, du kannst das gleiche Docker-Image auf mehreren Docker-Containern laufen lassen aber durch andere Ports erreichbar machen.
Das klingt erst einmal sehr kompliziert und es könnte sein, dass du gerade das Gefühl hast, dass Docker eher was für IT-Nerds ist, tatsächlich ist es aber schnell gelernt und nach ein paar erstellten Docker-Containern selbsterklärend.
Docker auf dem Raspberry Pi installieren
Um Docker zu nutzen, braucht es wenige Befehle auf der Konsole. Zunächst braucht der Raspberry Pi sein Betriebssystem, meist Raspberry Pi OS, welches schnell auf die SD oder besser einem USB-Device installiert wurde. Hier empfehle ich meinen Blogbeitrag zum Thema „Den Raspberry Pi absichern“, wo ich das genau erklärt habe. Danach öffnest du das Terminal und lädst zunächst ein Skript herunter, welches Docker auf unserem Raspberry Pi installieren wird, siehe Code 1.
curl -fsSL https://get.Docker.com -o get-Docker.shCode 1: Skript von Docker.com zum installieren
Das Skript selbst ist recht klein, mit gerade einmal 19kByte, siehe Abbildung 2, jedoch wird es gleich beim Ausführen eine Menge an unserem Raspberry Pi verändern bzw. anpassen und installieren.
Zunächst führt das Skript, wenn mit Code 2 zum Starten mit root-Rechten angestoßen, ein Update aller installierten Pakete durch und installiert im Anschluss alle benötigten Pakete für Docker.
sudo sh get-Docker.shCode2: Das Skript get-Docker ausführen
Danach fügt es die Paketquelle von Docker, samt GPG-Schlüssel, dem Paketmanager apt hinzu, um dann Docker zu installieren. Dabei handelt es sich um die Pakete Docker-ce, Docker-ce-cli und containerd.io. Je nach Internetleitung kann die Installation einen kurzen Moment dauern, jedoch solltet ihr am Ende eine Erfolgsmeldung im Terminal sehen, siehe Abbildung 3.
Damit nicht nur der Benutzer root Docker ausführen darf, sollte der Benutzer pi der Gruppe Docker hinzugefügt werden, siehe Code 3.
sudo usermod -aG docker $USERCode 3: pi der Gruppe Docker hinzufügen
Danach kannst du entweder den Raspberry Pi neustarten oder mit Code 4 die Gruppenrichtlinien neu laden.
newgrp dockerCode 4: Die Gruppenrichtlinien neu einlesen
Nun solltest du noch prüfen, ob Docker auch funktioniert. Was wäre da also besser als ein Image mit dem treffenden Namen hello-world? Dieses startest du mit dem Befehl aus Code 5.
docker run hello-worldCode 5: hello-world-Container im Docker starten
Wenn alles funktioniert hat, dann solltest du eine Ausgabe wie in Abbildung 4 sehen. Zugegeben, der Container macht erst einmal nicht viel, außer eine Ausgabe in der Konsole zu erzeugen.
Doch sollte es keine keinerlei Fehlermeldung bis hierhin gegeben haben, so weißt du, dass Docker ordnungsgemäß installiert wurde und einsatzbereit ist.
Portainer zur Dockerverwaltung
Vom Prinzip kann Docker über die Kommandozeile genutzt werden. Egal ob um neue Container anzulegen, Images herunterzuladen oder Docker Compose zu verwalten. Aber einfacher bzw. schöner wäre doch eine grafische Oberfläche, mit der wir diese Arbeit durchführen. Die Rede ist von Portainer, welches genau dies übernimmt. Portainer ist ein sehr mächtiges Tool und läuft als Docker-Container auf dem Raspberry Pi. Bevor der Container gestartet wird, musst du erst einmal ein Docker-Volumen erstellen. Dies machst du mit dem Befehl aus Code 6.
docker volume create portainer_dataCode 6: Dockervolumen für Portainer erstellen
Dieses Volumen brauchen wir, da ein Docker-Container beim Neustart seine Daten verliert. Um dies zu umgehen, soll der Docker-Container von Portainer ein Volumen einbinden, welches die angepassten oder erstellten Daten speichert. Im nächsten Schritt soll Portainer gestartet werden, was mit dem Befehl aus Code 7 geschieht.
docker run -d -p 8000:8000 -p 9443:9443 --name portainer --restart=always -v /var/run/docker.sock:/var/run/docker.sock -v portainer_data:/data portainer/portainer-ce:latestCode 7: Portainer starten
Den oben genannten Befehl, auch wenn du Ihn ggf. schon ins Terminal eingegeben hast, möchte ich noch erklären. Zunächst das Attribut -d welches den Docker-Container im Hintergrund ausführt. Mit -p verknüpfen wir die Ports vom Container mit dem Port des Hostsystems, also dem Raspberry Pi. In unserem Kommando die Ports 8000 und 9443 mit demselben Port des Raspberry Pis. Letzteres ist die https-Verbindung im Webbrowser. Zuletzt wird mit -v die im Container vorhandenen Pfade mit dem Volumen und zuvor noch der Socket von Docker mit Portainer verknüpft. In Fall von Portainer speichern wir die Daten für Portainer im eben angelegten Volumen. Mittels –restart=always wird der Docker-Container immer wieder neugestartet, egal ob durch einen Fehler oder einen Neustart des Raspberry Pi.
Damit Portainer überhaupt laufen kann, muss zunächst das Image von Portainer in der Community Edition heruntergeladen werden, siehe Abbildung 5. Hier brauchst du nichts zu machen, durch unseren Befehl, wird das von selbst durchgeführt.
Portainer wird in der Regel von docker hub heruntergeladen und auf dem Raspberry Pi gespeichert. In unserem Fall, da eine Webadresse angegeben wurde, wird Portainer von portainer.io heruntergeladen. Durch das Tag latest, welches mit :latest am Ende des Image-Parameters eingetragen wurde, wird die aktuellste Version genutzt. In der Konsole siehst du nach dem Herunterladen und Ausführen erste einmal nichts, aber der Container von Portainer sollte im Hintergrund laufen.
Ob Portainer läuft, können wir mit zwei verschiedenen Methoden herausfinden. Die erste Variante ist über den Befehl aus Code 8.
docker psCode 8: Liste alle aktiven Docker-Container
Dieser Befehl listet alle aktiven Container von Docker auf, siehe Abbildung 6. Jeder Container erhält dabei eine zufällige Container ID und wir sehen diverse Informationen zu dem Container.
Was direkt ins Auge fallen könnte ist, dass die Ports 8000 und 9443 für IPv4 und IPv6 freigegeben und an den Docker-Container von Portainer weitergeleitet wird.
Die Portainer-Oberfläche für Docker auf dem Raspberry Pi
Die zweite Variante zu prüfen, ob Portainer gestartet wurde, ist einen Webbrowser mit der Adresse vom Pi und dem Port 9443 zu öffnen, siehe Abbildung 7.
Denke bitte daran, dass die Adresse wie folgt aussieht https://IP-vom-PI:9443. Da Portainer das erste Mal gestartet wird, musst du zu Beginn noch ein sicheres Passwort für den Administrator admin eintragen. Dieses musst du dir entweder aufschreiben oder merken, weil zurücksetzen kannst du es nicht mehr. Danach landest du in der Home-Ansicht von Portainer, siehe Abbildung 8.
Auf der rechten Seite, hier markiert mit der rot umrandeten 1, kommst du in die einzelnen Untermenüs, welche ich teilweise gleich noch näher erläutern werde. In der Mitte, rot umrandete 2 oder dem Dashboard, siehe Abbildung 9, siehst du den Status von den Docker-Containern und weitere Informationen wie Images, Volumes oder Networks. Stacks lasse ich an dieser Stelle einmal aus, das wird in einem späteren Beitrag relevant werden.
Wechseln wir zunächst einmal in den Reiter Containers, mit dem entsprechenden Menüeintrag auf der rechten Seite, siehe Abbildung 10.
Hier sehen wir erst einmal zwei Dinge. Zum einen den Container von dem „hello-world“-Beispiel und den Portainer-Container. Bei letzterem könntest du dich nun ein bisschen wundern, da wir ja gerade in Portainer arbeiten und es im ersten Moment keinen Sinn ergibt, dass dieser Container hier erscheint. Tatsächlich liest Portainer über den Docker-Socket alle Container aus und zeigt diese an. Da Portainer auch als Docker-Container läuft, wird daher auch Portainer als solcher angezeigt. Im nächsten Schritt soll nun ein neuer Container erzeugt werden, mit dem du dann auch arbeiten kannst.
Das Applikations-Dashboard Heimdall
Bei dem Namen Heimdall könnten einige nun kurz an die Marvel-Filme von Thor denken. In der nordischen Mythologie ist Heimdall der Götterwächter und bewacht die Brücke, bzw. den Bifröst, zwischen den Welten. Ähnlich kannst du dir auch das Applikations-Dashboard Heimdall vorstellen. Jeder kann sich ein eigenes Profil erstellen und für alle Web-Applikationen einen Button erstellen, der dich dann dorthin bringt. Teilweise haben diese Buttons sogar interessante Zusatzfunktionen. Gerade Heimdall ist ein super Einstieg in Portainer und die diversen Menüs.
Das Docker-Image von Heimdall herunterladen
In den Basics von Docker habe ich geschrieben, dass jeder Container ein Image braucht. Heimdall ist da keine Ausnahme und so muss dieses Image erst einmal gesucht und runtergeladen werden. Erste Anlaufstelle für Images ist docker hub. Suche hier nach Heimdall, siehe Abbildung 11, wobei du eine Menge an Ergebnissen erhalten wirst.
Wichtig ist, dass du das Tag arm siehst, siehe rote Umrandung von Abbildung 11, da sonst das Image auf dem Pi nicht funktionieren würde. Gerade die Community um linuxserver.io stellen viele Images für den Raspberry Pi bereit, weswegen ich zum Eintrag linuxserver/heimdall nur raten kann. Gleichzeitig sind die Dokumentation und die GitHub-Pflege der einzelnen Images sagenhaft, was dir gerade am Anfang zu einem leichten Einstieg verhilft.
Wenn du nun auf der Seite von linuxserver/heimdall bist, siehst du auf der rechten Seite direkt den Docker-pull-Befehl, siehe Abbildung 12.
Weiter unten auf der Seite findet du einen Bereich Usage der dir erklärt, wie du mittels Docker-Compose, eine Art Skriptsprache, den Container zum Laufen bekommt. Es werden dabei alle wichtigen Einstellungen für Enviorments, Volume und Ports gezeigt, was wir gleich brauchen werden, siehe Abbildung 13.
Zunächst wollen wir aber das Image runterladen. Dazu wechselst du in Portainer ins Menü Images und suchst dort nach dem Image linuxserver/heimdall, siehe Abbildung 14.
Mit einem Druck auf den Button Pull the image, wird das Image dann bei docker hub gesucht und die Version mit dem Tag latest runtergeladen. Theoretisch kannst du, wenn du bei docker hub dir die Tagseite genauer ansiehst mittels :TAGNAME aussuchen, welche Version du haben willst. Je nach Größe vom Image und deiner Internetleitung, kann der Download kurz dauern. Danach siehst du aber in der unteren Liste einen weiteren Eintrag mit einem Flag Unused, was das Heimdall-Image ist, siehe Abbildung 15.
Aus dem Heimdall-Image wird ein Docker-Container
Der nächste Schritt ist nun, aus dem Image ein Docker-Container zu erzeugen. Dazu wechselst du in den Menüpunkt Containers von Portainer und wählst den Button Add container aus, siehe Abbildung 16.
Jetzt kommt der Moment, wo die Usage-Dokumentation der docker hub – Seite von Heimdall benötigt wird, daher solltest du diese parallel geöffnet haben. Zunächst braucht unser neuer Docker-Container einen Namen, hier Heimdall, sowie die Zuweisung, welches Image genutzt werden soll, hier linuxserver/heimdall, siehe Abbildung 17.
Als nächstes müssen die Netzwerkports vom Container mit dem Hostsystem, also dem Raspberry Pi, gemappt werden. Im Fall von Heimdall ist das der Port 80 und 443. In der Kartei Networt ports configuration drücken wir zweimal den Button publish a new network port und tragen die Ports ein, siehe Abbildung 18.
Da ich persönlich beim Öffnen der Website meines Docker-Pis die Heimdall-Seite gezeigt bekommen möchte, sind der Host- und Container-Port identisch. Achte dabei darauf, dass es sich um einen TCP-Port handelt und nicht UDP! Willst du einen anderen Port vom Host nutzen, so musst du später die Webadresse nach dem Schema http(s)://IP-vom-PI:Eingestellter-Port aufrufen.
Als nächstes musst du die Environments, das Volume und die Restart policy korrekt eintragen. Diese Einstellungen findest du am Ende der Seite. Bevor du damit aber beginnst, solltest du im Tab Command & logging bei Console den Punkt Interactive & TTY (-I -t) auswählen, siehe Abbildung 19.
Damit haben wir später Zugriff über die Konsole auf den Container und müssen nicht erst umständlich über docker-Kommandos versuchen Zugang zu bekommen.
Nun Wechsel in den Tab Volumes und richte mit dem Button map additional volume einen neuen Verweis für einen Container-Pfad zum Hostsystem ein, siehe Abbildung 20.
Hier wird der Ordner /config aus dem Image mit dem Ordner /home/pi/heimdall/config gemappt. Das kannst du dir wie eine Art Verknüpfung auf einem PC vorstellen, wobei hier der Container-Ordner quasi ausgetauscht wird. Das geht in diesem Fall aber nur, da ich die Option Bind anstelle von Volume ausgewählt habe. Der Vorteil bei einem Bind ist, dass ich auf die Daten zugreifen kann, was bei einem Container-Volume schwieriger ist. In dem oben gezeigten Beispiel wird im Arbeitsverzeichnis vom User pi, also /home/pi, der Ordner /heimdall/config erzeugt und in den Container gemountet.
Nun müssen noch die Environments im Tab Env eingetragen werden. Drücke dazu dreimal den Button Add an enviroment variable und trage die Werte für PUID, PGID und TZ ein, siehe Abbildung 21. Wenn du ein Standard Raspberry Pi OS hast, hat der Benutzer pi jeweils die 1000 für PUID und PGID.
Die entsprechenden Einstellungen kannst du aus Abbildung 21 oder dir die Environments auf der docker hub – Seite von linuxserver/heimdall unter Usage ansehen. Da ich mich in der Zeitzone von Berlin befinde, trage ich hier für das Environment TZ entsprechend Europe/Berlin ein.
Bevor der docker-Container nun deployed werden kann, solltest du noch im Tab Restart policy die Restart policy von Never auf Always umstellen, siehe Abbildung 22.
Im Anschluss kannst du auf den Button Deploy the container drücken. Wenn alles richtig eingestellt ist, wirst du beim erfolgreichen deploy, direkt auf die Container-Seite von Portainer weitergeleitet und siehst einen gestarteten Heimdall-Container, siehe Abbildung 23.
An der Stelle musst du ggf. noch ein bisschen warte, da beim ersten Starten vom Heimdall-Container noch einige Keys und Konfigurationen im /config-Ordner erzeugt werden müssen. Bei einem Pi 4 mit 4GB dauert der erste Start ungefähr 2 Minuten, danach kannst du aber die Heimdall-Seite erreichen, wobei du vorher das selbsterzeugte SSL-Zertifikat akzeptieren musst, siehe Abbildung 24. Wird der Container neu gestartet, entfällt diese Wartezeit, da die Daten dann schon vorhanden sind.
Kurzeinführung in Heimdall
Die Webapplikation von Heimdall ist intuitiv und schnell gelernt. Über die Menüleiste am rechten unteren Rand, siehe Abbildung 25, kannst du Heimdall komplett nach deinem Wunsch konfigurieren.
Ich empfehle am Anfang unter dem Menü Einstellungen die Sprache auf Deutsch zu schalten, dann wird es ggf. ein bisschen leichter bei der Erstellung der Web-Shortcuts. Wie du eine Applikationsliste erzeugst, will ich dir in einem einfachen Beispiel zeigen.
Wechsle zunächst in die Applikationsliste und führe ein Update der App Liste durch, siehe Abbildung 26.
In meinem Beispiel erstelle ich nun einen Shortcut zu meiner FritzBox, wozu es auch ein Application Type gibt, siehe Abbildung 28. Gerade durch das Applications Type AVMFritzBox werden schon einige Bilder und Buttonanpassungen vorgenommen.
Lediglich der Name und die URL muss noch nachgetragen werden. Theoretisch kannst du über den Button Hochladen einer Datei auch ein anderes Icon auswählen, sofern es dir nicht gefällt oder du die Applikation nicht in der Liste findest. Nach dem Speichern erscheint der Button in deiner Übersicht, siehe Abbildung 29.
Je nach Geschmack und Arbeit, kann die Übersicht schon einige Shortcuts zu wichtigen Webapplikationen zeigen, wie in meiner Übersicht, siehe Abbildung 30.
Zusammenfassung
Ich habe dir bisher Docker und Portainer versucht näher zu bringen. Ich hoffe die Erklärung zwischen einem Docker-Container zu einer VM ist mir insoweit gelungen, dass dieser Unterschied nun klar ist. Mit deinem ersten Docker-Container Heimdall habe ich dir zudem gezeigt, wie einfach es ist, ein Docker-Image runterzuladen und als Container dann zu starten. Auf viele Eigenheiten von Docker bin ich nicht eingegangen, das hätte hier aber den Rahmen um weiten gesprengt. Nicht zuletzt gibt es von Michael Kofler und Bernd Öggl ein komplettes Buch zu dem Thema Docker, was die Komplexität verdeutlichen soll. Wahrscheinlich hat dich dieser doch recht umfangreiche Beitrag etwas erschlagen, aber ab jetzt werden die Themen in dieser Serie einfacher bzw. kompakter. Gerade die Grundlagen von Docker sind wichtig, damit du später in deinem Test- bzw. Produktivumfeld sicher arbeiten kannst.
Dies ist Beitrag 2 von 2 der Serie “Raspberry Pi Docker Basics”
In dieser Serie lernst du den Umgang mit Docker Containern auf dem Raspberry Pi
Genug von Werbung und Trackern? In diesem umfassenden Guide erklären wir dir, wie du Pi-hole auf dem Raspberry Pi mittels Docker installieren und konfigurieren kannst.
Im ersten Teil dieser Serie habe ich dir Docker und Portainer nähergebracht und genau erläutert, worum es sich bei dieser Technik handelt. Gleichzeitig habe ich dir Heimdall als erstes laufendes Projekt vorgestellt. Nun will ich dir den Vorteil von Docker zeigen, indem wir einen zweiten Container mit einem Webserver laufen lassen werden. Anders als zuvor soll der Container nun in unserem Netzwerk etwas tun und uns beim Surfen durchs Internet von Werbung befreien. Die Rede ist von Pi-hole, was ich dir in den Grundzügen auch noch erklären werde. Keine Angst, auch dieses Mal werde ich dich durch die Konfiguration vom Container führen und danach durch die Einstellung von Pi-hole.
INHALTSVERZEICHNIS
Die Hardware für diesem Blog
Vom Prinzip kannst du jeden Raspberry Pi nehmen. Solltest du noch keinen Raspberry Pi besitzen, dann melde dich in unserem kostenlosen BerryBase Maker Club an, wo wir aktuell exklusiv für Mitglieder Boards zur Verfügung haben. Es sollte aber zumindest ein Raspberry Pi 3, besser noch ein 4er mit mindestens 4GB RAM sein.
Die Software für diesem Blog
Damit du diesen Abschnitt vom Blogbeitrag mit durcharbeiten kannst, brauchst du Docker und Portainer auf deinem Raspberry Pi. Wie das geht, erkläre ich im ersten Teil dieser Serie, wobei du die Installation von Heimdall nicht durchführen musst. Pi-hole funktioniert auch ohne Heimdall, was ja auch der Sinn von Docker ist.
Was ist bzw. wie funktioniert Pi-hole
Bevor ich dir erkläre, wie du Pi-hole auf deinem Raspberry Pi als Docker-Container einrichtest, sollte vielleicht vorab geklärt werden, was Pi-hole genau macht. Pi-hole ist ein sogenannter Tracking- und Werbeblocker und kann auch als DHCP-Server eingesetzt werden. Wie der Name schon verrät, ist Pi-hole für unseren Kleinstcomputer, dem Raspberry Pi, entwickelt worden. Vom Prinzip kann Pi-hole über die Konsole bedient werden, aber durch eine grafische Oberfläche, die über einen Webserver bereitgestellt wird, ist die Bedienung einfacher.
Aber wie genau filtert Pi-hole nun Werbung und unterbindet Tracking? Vom Prinzip steckt hinter Pi-hole eine Datenbank, die Abfragen von unserem Computer bzw. Geräte die Pi-hole als DNS-Server verwenden, abgleicht und im Zweifelsfall unterbindet. Ich will nicht zu tief ins Detail gehen, da ich hier keinen Exkurs über Netzwerk-Technik anfangen möchte, dennoch will ich versuchen es einfach zu erklären.
Wenn du mit deinem PC einen Webadresse in die Adresszeile eintippst und Enter drückst, passiert eine ganze Menge. Zunächst wird deine Anfrage über den Router an einen DNS-Server weitergegeben. Diese Abfrage muss gestellt werden, damit im späteren die IP-Adresse der angeforderten Webadresse unserem Computer bekannt ist. Den hinter jeder Webadresse steht im Grunde nur eine eindeutige IP-Adresse zu einem Server. Ähnlich wie bei einem Telefonbuch erhalten wir vom DNS-Server eine Adresse zurück und landen von dort auf unserer gewünschten Website.
Jetzt kommt Pi-hole ins Spiel. Wenn du Pi-hole als lokalen DNS-Server einbindest, werden deine Anfragen zwischen Router und deinem Computer „abgefangen“ und analysiert. D.h. die Anfragen über eine Website laufen zunächst über den Pi-hole und wenn eine geblockte Adresse dabei ist, wird die Anfrage zu der Seite direkt blockiert. Das ist aber erst der erste Teil, den Pi-hole durchführt. Wenn eine Website in deinem Browser geladen wird, dann wird auch meist Zusatzinhalt, wie Werbebanner oder ähnliches nachgeladen. Werbung oder Tracker sind, gerade in der heutigen Zeit, die Einnahmequelle, daher übertreiben es viele Webseiten mit zugeschalteter Werbung oder Trackern. Auch hier greift Pi-hole wieder ein. Wenn sich in dem nachgeladenen Inhalt eine Adresse befindet, die eine geblockte Werbung oder einen Tracker enthält, wird diese Anfrage ebenfalls geblockt. All das passiert über die schon erwähnte Datenbank im Hintergrund.
Aber wie wird diese Datenbank zur Filterung genau befüllt?
Hier bietet verschiedene Dienstleister oder Privatpersonen sogenannte AdLists an, die eine Vielzahl von ungewollten Webadressen enthalten. Eine solche Liste kannst du dir vom GitHub-Verzeichnis von StevenBlack mal ansehen. Die hier bereitgestellte Liste umfasst über 10.000 Einträge. Eine solche AdList wird heruntergeladen und direkt danach in die Datenbank eingetragen. Je mehr Einträge also vorhanden sind, umso mehr Werbung oder Tracker werden geblockt.
So schön sich das im ersten Moment anhört, gibt es auch einen Nachteil. Durch die vielen geblockten Webadressen kann es auch passieren, dass harmlose Webseiten oder LogIn-Seiten geblockt werden. In meinem Fall hatte Pi-hole zur Folge, dass ich mich mit Autodesk Fusion 360 nicht mehr anmelden konnte oder Nvidia-Logins nicht mehr verfügbar waren. Das ist ärgerlich, aber hier gibt es mit sogenannten WhiteLists, also geduldeten Adressen, eine Möglichkeit diese wieder zu erlauben. Egal ob über eine feste Adresse oder eine sogenannte Wildcard, beides ist zur Freischaltung möglich. Eine Liste aller Anfragen und ob diese geblockt oder freigegeben sind, kann man in einem Log einsehen. Dazu werde ich dir aber im späteren Verlauf dieses Blogartikels mehr erklären.
Pi-hole als Docker-Container auf dem Raspberry Pi einrichten
Wie schon im ersten Blogbeitrag, wird über Portainer ein Docker-Container von Pi-hole erstellt. Das geschieht wieder in zwei Phasen. Als erstes wird das Image heruntergeladen und im Anschluss werden wir aus dem Docker-Image ein Docker-Container erstellen. Damit du das alles nachmachen kannst, musst du dich über die Weboberfläche von Portainer anmelden. Nutze dazu die Login-Daten, die du im ersten Teil der Blogserie extra für Portainer erzeugt hast.
Das Image von Pi-hole herunterladen
Zunächst wird das Docker-Image von Pi-hole benötigt. Dieses finden wir, wie auch schon im ersten Beitrag, bei docker hub. Wenn du in der Suche pihole einträgst, gelangst du schon im ersten Suchergebnis auf das offizielle Docker Image der Pi-hole-Macher, siehe Abbildung 1.
Da es sich, wie schon oben erwähnt, um das offizielle Image von pi-hole.net handelt, sollte auch genau das heruntergeladen werden. Dazu öffnest du die docker hub – Seite von pihole und kopierst dir aus dem Docker Pull Command den entsprechenden Pfad, siehe Abbildung 2.
Lass am besten die Seite gleich offen, wir werden Sie gleich noch brauchen, wenn es zu der Konfiguration des Pi-hole Docker Container auf dem Raspberry Pi kommt. Zunächst loggst du dich bei Portainer ein und Wechsel zu Menü Images, siehe Abbildung 3.
Auch in diesem Fall wollen wir die neuste Version von Pi-hole haben, daher geben wir am Ende von pihole/pihole das Tag :latest an. Direkt danach laden wir das Image über den Button Pull the image herunter. Das Image ist knapp 250MB groß, daher kann es je nach Internetleitung einen Moment dauern, am Ende sollte aber das Image mit dem Flag Unused in der Imageliste erscheinen, siehe Abbildung 4.
Das Image ist damit schon einmal auf unserem Raspberry Pi verfügbar und es kann ein Docker-Container daraus erzeugt werden.
Den Pi-hole Docker Container auf dem Raspberry Pi erzeugen
Damit aus dem Docker-Image ein Docker-Container wird, musst du nun in den Menüpunkt Containers und drücken auf den Button Add container, siehe Abbildung 5.
Damit du später den Docker-Container auf dem Raspberry Pi wiederfindest, braucht dieser erst einmal einen eindeutigen Namen und das Image muss angegeben werden. Dies passiert, wie du schon sicher weißt, am Anfang der Konfiguration, siehe Abbildung 6.
Bevor es nun weitergeht, sollten wir einen Blick in die Dokumentation werfen. Hier erhalten wird interessante Informationen über den Container, wie z.B. die Ports oder die Environments. Ersteres ist dabei für unseren Tracker- und Werbungsfilter vom besonderen Interesse, da wir einen alternativen DNS-Server dafür verwenden, siehe Abbildung 7.
Der Grund dafür ist, dass die Ports für DNS und dem Bootstrap Protocol standardisiert sind und auch welche Art von Protokoll. In den meisten Fällen kommt das sogenannte Transmission Control Protocol, kurz TCP, zum Einsatz. In manchen Fällen aber auch das User Datagram Protocol, kurz UDP. Die Unterschiede möchte ich hier nicht erläutern, wichtig ist an dieser Stelle erst einmal, dass die Ports für unseren alternativen DNS-Server korrekt gesetzt werden, dies sind die Ports 53 und 67. Beim Port 80 handelt es sich um den Standardport vom Webserver, bei Pi-hole kommt der lighttp zum Einsatz, der die grafische Oberfläche von Pi-hole bereitstellt. Also erzeugst du erst einmal neue Netzwerkports und stellst diese korrekt ein, siehe Abbildung 8.
Achte darauf, dass du TCP und UDP korrekt hinter den Ports einstellst, da andernfalls Pi-hole nicht funktionieren könnte. Solltest du Heimdalll aus dem ersten Teil verwenden, so musst du dir einen anderen Port für den Webserver aussuchen. Typisch ist, dass man Port 8080 als http-Alternative verwendet. Es geht in der Theorie aber jeder andere Port, der nicht schon vom Host belegt ist.
Im nächsten Schritt stellst du zunächst im Tab Command and logging bei Console den Wert auf Interactive && TTY.
Warum, werde ich dir im Bezug auf das Updaten der Filterdatenbank näher erklären. Daher an dieser Stelle erst einmal nur setzen. Nun soll dem Container ein Volumen bzw. ein Bind zugeordnet werden, auch hier hilft die Doku der Docker Hub – Seite. In meinem Fall nutze ich die Bind-Methode, siehe Abbildung 10, damit man später relativ einfach auf die Daten vom Container zugreifen kann.
Mit den Environments legst du zum einen die Zeitzone fest und kannst auch ein von dir gewünschtes Webadmin-Passwort definieren, siehe Abbildung 11. Beides musst du im Tab ENV vornehmen.
Die Zeitzone, als Name TZ, braucht als Variablenwert Europe/Berlin. Vergibst du der Variable WEBPASSWORD kein Value oder legst diese nicht an, wird ein zufälliges Passwort generiert. Im Tab Restart policy setzt du die Neustart-Regelung auf Always, siehe Abbildung 12.
Bevor du nun den Pi-hole Docker Container auf dem Raspberry Pi ausführst, muss das Kernel-Modul NET_ADMIN unter dem Tab Capabilities aktiviert werden, siehe Abbildung 13.
Hast du bis hier hin alles genau befolgt, sollte der Container von Pi-hole nun ohne Fehlermeldung gestartet worden sein und nach einer kurzen Zeit in deiner Containers-Liste mit dem Status running oder sogar schon healthy zu finden sein, siehe Abbildung 14.
Abbildung 14: Pi-hole-Container gestartet
Healthy ist ein Status bei Docker, was durch ein internes Skript geprüft wird. Genauere Infos dazu findest du bei Docker direkt in der Manual-Seite.
Pi-hole administrieren und benutzen
Der Docker-Container ist gestartet und Pi-hole ist nun einsatzbereit. Jetzt muss Pi-hole noch angepasst werden und am Ende sollte der Pi-hole auch zwischen PC und Router als alternativer DNS-Server eingebunden werden.
Gestatten Pi-hole
Eine komplette Übersicht von Pi-hole kann ich in diesem Blog nicht geben, jedoch ist die Hilfe-Seite von Pi-hole dir einmal näher ansehen. Ich zeige dir hier, wie du weitere AdLists einträgst, Whitelists erzeugst und was es noch für interessante Einstellungen gibt. Zunächst musst du aber erst einmal die Weboberfläche von Pi-hole über deinen Browser aufrufen. Wenn du bis hierhin den Blog genau befolgt hast, ist die Adresse IP-Deines-Pi:8080/webadmin. Gibst du nur die IP mit dem Port an, landest du auf einer Seite, die dich automatisch zur Webadmin-Seite von Pi-hole weiterleitet, siehe Abbildung 15.
Dort angekommen, siehst du schon im nicht eingeloggten Zustand wichtige Informationen. Das Dashboard ist für die Statistik der perfekte Ort, siehe Abbildung 16.
Neue Blacklists in Pi-hole auf dem Raspberry Pi hinzufügen
Aktuell wirst du nicht viel sehen, da der Pi-hole nicht zum Filtern verwendet wird. Interessant ist aber, dass Pi-hole schon über 100.000 Domains in der Blocklist hat. Das wollen wir nun etwas erweitern, wofür du über die Login-Seite dich mit deinem Passwort einloggst. Wechsel danach in der linken Menüleiste zu Group Management -> AddLists, siehe Abbildung 17.
Jetzt trägst du in dem Feld Address eine gültige Adresse ein. In unserem Fall ist das zu Demozwecken die Adresse https://easylist.to/easylist/easylist.txt und bestätigen mit Add, siehe Abbildung 18.
Damit ist zwar die Liste nun eingetragen, die Informationen in der Liste sind aber noch nicht in unserer Datenbank hinterlegt. Daher folgt nun der Schritt, dass Pi-hole sich aus den angegebenen Adressen die Informationen zieht. Dabei bietet Pi-hole zwei Varianten an:
- Über ein Untermenü in der Weboberfläche
- Mittels einem Terminal-Command
An dieser Stelle, auch weil ich in der Vergangenheit ein paar Mal Probleme hatte, nutze ich lieber das Terminal-Command. Der zweite Grund ist, dass du nun auch erfährst, warum in den Container-Einstellungen in Portainer immer bei den Command & logging -Einstellungen, die Console auf Interactive & TTY steht, siehe dazu Abbildung 9. Du wechselst nun wieder zu Portainer in den Reiter Containers und wählst das Symbol Exec Console, Abbildung 19.
Im darauffolgenden Menü kannst du alle Einstellungen so belassen und direkt auf Connect drücken, siehe Abbildung 20.
Jetzt bist du in der Konsole vom Pi-hole-Container mit dem Account root, siehe Abbildung 21.
Nun soll der Befehl für das Herunterladen und Aktualisieren der Blacklists erfolgen. Dazu nutzt du das Command aus Code 1.
pihole -gCode 1: Pi-hole Blacklist aktualisieren
Je nach Anzahl von Adressen, kann der Vorgang ein bisschen dauern, da hier aber nur eine weitere Liste hinzugekommen ist, wirst du schnell eine Erfolgsmeldung sehen, siehe Abbildung 22.
Eine Liste macht noch nicht viel aus, daher soll nun noch ein bisschen erweitert werden. Hilfe zu nützlichen URLs mit Blacklists finden wir bei firebog.net. Keine Angst, du musst nun nicht jede einzelne Adresse eingeben, hier hat Pi-hole eine nette Funktion eingebaut. Mehrere URLs können Leerzeichengetrennt in die Address-Zeile eingetragen werden. Du kopierst also von firebog.net ein paar URLs und fügst diese dann in die Adresszeile ein, siehe Abbildung 23.
Wieder zu Portainer in der Konsole, führst du das Command aus Code 1 aus. Das wird diesmal ein bisschen länger dauern, da knapp 60.000 neue Einträge hinzukommen. So kannst du bequem die Liste erweitern. Je nachdem wie viele URLs du einträgst, können bis zu 1 Millionen Einträge hinzukommen.
Den Pi-hole nun auf einem Arbeitsrechner einbinden
Aktuell wird der Pi-hole unerwünschten Traffic noch nicht blocken, da Pi-hole in Netzwerk noch gar nicht verwendet wird. Das Stichwort für euer Betriebssystem heißt hier Bevorzugter DNS-Server, der je nach Betriebssystem an einer anderen Stelle eingetragen werden muss. Im Fall von Windows geht man in die Netzwerkeinstellungen und wählt den passenden Netzwerkadapter aus. Mit einem Doppelklick auf Internetprotokoll, Version 4 (TCP/IPv4) kannst du im nachfolgenden die IP-Adresse von deinem Pi-hole eintragen, siehe Abbildung 24.
Es gibt aber auch die Möglichkeit, direkt Pi-hole auf dem Router laufen zu lassen. Diese Art möchte ich dir aber hier nicht vorstellen, kann aber einfach im Internet nachgelesen werden. Auch behandle ich nur den alten Standard TCP/IPv4 und nicht das immer mehr kommende TCP/IPv6.
Zusammenfassung
Ich habe dir mit diesem Blogbeitrag den DNS-Filter Pi-hole vorgestellt und wie dieser als Docker-Container mit Portainer eingerichtet wird. Auch habe ich dir gezeigt, wie du mittels Portainer auf die Konsole deiner Container zugreifen kannst. Pi-hole ist aber so viel mehr, als das was ich in diesem Beitrag zeigen konnte! Mit Whitelists, Wildcards und diversen Einstellungen, kann Pi-hole noch deutlich mehr! Wenn dir also Pi-hole gefällt oder du dein Wissen vertiefen willst, dann kann ich dir das Forum von Pi-hole nur empfehlen. Hier findest du eine große Wissensdatenbank, viele helfende Leute und auch Anleitungen und Ankündigungen rund um den Pi-hole.
Gerade im Bezug auf das Thema Sicherheit, kann ich die Integration von Pi-hole ins Netzwerk nur empfehlen.
Setup a Raspberry Pi Zero W to run a Web Browser in Kiosk Mode
with Dakboard

Download Raspbian Buster Lite and write it to the SD card
https://www.raspberrypi.org/downloads/raspbian/
First login
u:pi
p:raspberry
Configuration
sudo raspi-config
-
change pi password
-
change hostname
-
set wifi ssid and pass
-
set timezone
-
inferface opt -> SSH enable
-
Boot Options -> Desktop / CLI -> Console Autologin
-
finish -> reboot
Applying latest versions
sudo apt-get update && sudo apt-get upgrade -y
Creating a Minimum X Server Environment for the Chromium Browser
sudo apt-get install --no-install-recommends xserver-xorg x11-xserver-utils xinit openbox -y
sudo apt-get install --no-install-recommends chromium-browser -y
Remove Rainbow Screen (OPTIONAL)
sudo nano /boot/config.txt
# Disable rainbow image at boot
disable_splash=1
Create an free account on Dakboard and get your custom board url
Configure Openbox.
sudo nano /etc/xdg/openbox/autostart
# Disable any form of screen saver / screen blanking / power management
xset s off
xset s noblank
xset -dpms
# Allow quitting the X server with CTRL-ATL-Backspace
setxkbmap -option terminate:ctrl_alt_bksp
# Start Chromium in kiosk mode
sed -i 's/"exited_cleanly":false/"exited_cleanly":true/' ~/.config/chromium/'Local State'
sed -i 's/"exited_cleanly":false/"exited_cleanly":true/; s/"exit_type":"[^"]\+"/"exit_type":"Normal"/' ~/.config/chromium/Default/Preferences
chromium-browser --disable-infobars --noerrdialogs --incognito --check-for-update-interval=1 --simulate-critical-update --kiosk '[https://DAKBOARD-CUSTOM-URL-HERE]'
Start X automatically on boot
sudo nano .profile
[[ -z $DISPLAY && $XDG_VTNR -eq 1 ]] && startx -- -nocursor
Vertical screen (OPTIONAL)
sudo nano /boot/config.txt
display_rotate=1
Refreshes
sudo apt-get install xdotool -y
sudo nano keyF5
export display=:0,0
xdotool keydown F5; xdotool keyup F5 &
exit
sudo chmod +x keyF5
sudo chown pi:pi keyF5
crontab -e
#Refesh every 30 min
0 */30 * * * /home/pi/keyF5
#Shutdown at 11PM (OPTIONAL)
* 23 * * * sudo shutdown -h
Zerocam
Scripte:
#/bin/bash
raspistill -t 86000000 -tl 10000 --rotation 90 -q 80 -o /home/pi/Photo/image%04d.jpg
------------------------------------------------------------------------------------------------------------------------------
#/bin/bash
raspistill -t 0 -tl 10000 -w 1920 -h 1080 --annotate 12 --rotation 90 -o /home/pi/Photo/image%04d.jpg
------------------------------------------------------------------------------------------------------------------------------
rc.local:
#!/bin/sh -e
#
# rc.local
#
# This script is executed at the end of each multiuser runlevel.
# Make sure that the script will "exit 0" on success or any other
# value on error.
#
# In order to enable or disable this script just change the execution
# bits.
#
# By default this script does nothing.
#aktivieren...
#/home/pi/10sec-still_FullHD.sh
#/home/pi/camstream.sh
# Print the IP address
_IP=$(hostname -I) || true
if [ "$_IP" ]; then
printf "My IP address is %s\n" "$_IP"
fi
exit 0
------------------------------------------------------------------------------------------------------------------------------
Streaming: http://zerocam2:8080/?action=stream
/bin/bash
v4l2-ctl -c compression_quality=85
v4l2-ctl -c brightness=55
v4l2-ctl -c rotate=90
v4l2-ctl -c contrast=30
v4l2-ctl -c saturation=20
v4l2-ctl -c scharpness=60
mjpg_streamer -i "input_uvc.so -d /dev/video0 -r 1280x720 -f 25" -o "output_http.so -w /usr/local/share/mjpg-streamer/www -p 8080"
------------------------------------------------------------------------------------------------------------------------------
Anleitung:
Let’s test by trying to run mjpg-streamer against the input_uvc.so plugin, since I”m not using a Raspi-Camera, but a USB one instead. (See notes at the bottom about Raspberry Pi Bullseye and Raspi-Cameras). I’ll also output using the http plugin. So my testing command line looks like this:
|
1
2
|
/usr/local/bin/mjpg_streamer -i "input_uvc.so -f 15 -r 640x480" \ -o "output_http.so -w /usr/local/share/mjpg-streamer/www" |
Executing that line gives us a dump of data – here’s the relevant info:
|
1
2
3
4
5
6
7
8
9
10
11
|
MJPG Streamer Version: git rev: 5a6e0a2db163e6ae9461552b59079870d0959340 i: Using V4L2 device.: /dev/video0 i: Desired Resolution: 640 x 480 i: Frames Per Second.: 15 i: Format............: JPEG i: TV-Norm...........: DEFAULT o: www-folder-path......: /usr/local/share/mjpg-streamer/www/ o: HTTP TCP port........: 8080 o: HTTP Listen Address..: (null) o: username:password....: disabled o: commands.............: enabled |
Our key variables to tweak are -f for frame rate, and -r for resolution. I’ll change those later, but for a quick test I head on out to my browser and point it at the www server at http://cam-pi-zero.local:8080/
Not only do we see the web interface, but a snapshot of the web cam, which was, clearly, laying down on a workbench behind me while I tried this out.
Validating the stream worked (by clicking ‘Stream’) and turning around, I could see myself moving:
You can now hit CTRL-C in your SSH window (or terminal) and quit the stream. After this point, I could delete the build files I downloaded.
Tweaking configuration
I wanted to run my camera at its intended resolution and at least a frame rate of 30fps. To do that I modified my command line:
|
1
2
3
|
#30fps, 1080 HD/usr/local/bin/mjpg_streamer -i "input_uvc.so -f 30 -r 1920x1080" \ -o "output_http.so -w /usr/local/share/mjpg-streamer/www" |
I then loaded my own stream up in VLC by opening the direct network path to the stream:
http://cam-pi-zero.local:8080?action=stream
That worked, and I get about a 1-2 second delay from Pi to VLC. So I wouldn’t use this with audio feeds unless I was planning on creating a sync delay. I’m using this to monitor 3D prints, or watch birds outside, so my use case does not demand low latency. Is it exactly 30 frames per second? No…. NO it’s not.
At 1280×720, it seemed closer, but at 1920×1080, when set at 30fps, it definitely wasn’t even close. I’d guess more like 15.
The PI wasn’t maxed out on CPU, but it could just be the nature of USB 2.0 at this point. I’m not sure how I can tell if it’s overloaded there or not, but, once again, this is a light monitoring video stream, I don’t care too much about latency. It could be WiFi as well. Someday I may dig in a bit more and find out where the bottleneck is.
I think you could probably choose either 1920×1080 15fps or 1280×720 30fps routes and be okay.
|
1
|
v4l2-ctl --list-formats-ext |
Running On Startup
I liked Jacob Salmela‘s script – all I did was change it for my command line on the stop and restart section for my resolution and frame-rate. Save the following script by doing a sudo vi:
|
1
|
sudo vi /etc/init.d/livestream.sh |
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
|
#!/bin/sh# /etc/init.d/livestream.sh### BEGIN INIT INFO# Provides: livestream.sh# Required-Start: $network# Required-Stop: $network# Default-Start: 2 3 4 5# Default-Stop: 0 1 6# Short-Description: mjpg_streamer for webcam# Description: Streams /dev/video0 to http://IP/?action=stream### END INIT INFOf_message(){ echo "[+] $1"}# Carry out specific functions when asked to by the systemcase "$1" in start) f_message "Starting mjpg_streamer" /usr/local/bin/mjpg_streamer -b -i "input_uvc.so -f 15 -r 1920x1080" -o "output_http.so -w /usr/local/share/mjpg-streamer/www" sleep 2 f_message "mjpg_streamer started" ;; stop) f_message "Stopping mjpg_streamer…" killall mjpg_streamer f_message "mjpg_streamer stopped" ;; restart) f_message "Restarting daemon: mjpg_streamer" killall mjpg_streamer /usr/local/bin/mjpg_streamer -b -i "input_uvc.so -f 15 -r 1920x1080" -o "output_http.so -w /usr/local/share/mjpg-streamer/www" sleep 2 f_message "Restarted daemon: mjpg_streamer" ;; status) pid=`ps -A | grep mjpg_streamer | grep -v "grep" | grep -v mjpg_streamer. | awk ‘{print $1}’ | head -n 1` if [ -n "$pid" ]; then f_message "mjpg_streamer is running with pid ${pid}" f_message "mjpg_streamer was started with the following command line" cat /proc/${pid}/cmdline ; echo "" else f_message "Could not find mjpg_streamer running" fi ;; *) f_message "Usage: $0 {start|stop|status|restart}" exit 1 ;;esacexit 0 |
Then we enable this on startup by performing:
|
1
2
|
sudo chmod 755 /etc/init.d/livestream.shsudo update-rc.d livestream.sh defaults |
Now you can reboot your pi, or use commands like ‘sudo service livestream start’ I rebooted my pi, and my fed was running, and running a status command on my service yields:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
|
pi@cam-pi-zero:~ $ sudo service livestream status● livestream.service - LSB: mjpg_streamer for webcam Loaded: loaded (/etc/init.d/livestream.sh; generated) Active: active (running) since Thu 2020-05-14 11:46:09 CDT; 2min 51s ago Docs: man:systemd-sysv-generator(8) Process: 411 ExecStart=/etc/init.d/livestream.sh start (code=exited, status=0/SUCCESS) Memory: 2.2M CGroup: /system.slice/livestream.service └─416 /usr/local/bin/mjpg_streamer -b -i input_uvc.so -f 15 -r 1920x1080 -o output_http.soMay 14 11:46:07 cam-pi-zero.local mjpg_streamer[416]: MJPG-streamer [416]: TV-Norm...........: DEFAULMay 14 11:46:08 cam-pi-zero.local mjpg_streamer[416]: MJPG-streamer [416]: www-folder-path......: /usMay 14 11:46:08 cam-pi-zero.local mjpg_streamer[416]: MJPG-streamer [416]: HTTP TCP port........: 808May 14 11:46:08 cam-pi-zero.local mjpg_streamer[416]: MJPG-streamer [416]: HTTP Listen Address..: (nuMay 14 11:46:08 cam-pi-zero.local mjpg_streamer[416]: MJPG-streamer [416]: username:password....: disMay 14 11:46:08 cam-pi-zero.local mjpg_streamer[416]: MJPG-streamer [416]: commands.............: enaMay 14 11:46:08 cam-pi-zero.local mjpg_streamer[416]: MJPG-streamer [416]: starting input plugin inpuMay 14 11:46:08 cam-pi-zero.local mjpg_streamer[416]: MJPG-streamer [416]: starting output plugin: ouMay 14 11:46:09 cam-pi-zero.local livestream.sh[411]: [+] mjpg_streamer startedMay 14 11:46:09 cam-pi-zero.local systemd[1]: Started LSB: mjpg_streamer for webcam. |
Conclusion
Using the Raspberry Pi for video streams is good enough if we’re looking for low frame rate monitoring without audio. I’ve yet to find anything that really gives me the frame rate and audio (regardless of latency) that a standard USB webcam directly into my OBS machine would give. Maybe if NDI ever makes it on to the raspberry Pi, or if there is ever SLDP support.
Have you tried streaming across the network on a Raspberry Pi with a USB webcam? Did you fare better than I? Let me know!
Nevertheless, with that, I’m done! I can now embed this into OBS via the VLC media source or anything that can handle an HTTP Motion JPEG video stream. I won’t have audio, but that’s okay for what I’m using this for.
Raspi-Cameras (libcamera is in, raspivid is out in Bullseye)
Mjpg-Streamer won’t have the raspicam input module anymore if you compile on Bullseye, because I believe the headers don’t exist as the Bullseye version is going the way of libcamera. While I was able to hack around that and build it, I got HORRIBLE artifacts using a raspberry pi camera with the h264 codec and libcamera. I tried switching codecs to MJPEG instead of H264 and had less artifacts, but worse frame rate. So for now I decided to go with gstreamer instead of mjpg-streamer at 1280×720 for a nice 30fps solution.
For me, what worked was to enable the legacy raspi-camera support (so we’re not using libcamera, we’re using v4l2).
Here are the rough steps:
- Started out with Bullseye, latest install with sudo apt update/sudo apt upgrade executed.
- Edit /boot/config.txt and change the following:
- start_x=1 //add this line
- gpu_mem=128 //probably no higher
- #camera_auto_detect=1 //Comment this line out
- Restart
- Installs:
|
1
2
|
sudo apt-get install gstreamer1.0-tools gstreamer1.0-plugins-base \ gstreamer1.0-plugins-good gstreamer1.0-plugins-bad |
Then execute this on the command line:
|
1
|
/usr/bin/gst-launch-1.0 v4l2src ! video/x-h264,width=1280,height=720,framerate=30/1 ! h264parse config-interval=1 ! matroskamux streamable=true ! tcpserversink host=::0 port=9000 sync=false sync-method=2 |
Once that’s up and running, I ran VLC against it using :network-caching=250 and a URL of tcp://<yourhostname>:9000 and was able to get a decent stream. That’s about the extent I’ve been pushing the raspi-cameras as I typically use the USB side. I did notice it was nice and fluid, along with less power consumption by a 100 milliamps or so, so I think I’ll use this as a portable battery powered wireless camera to use around the house on streams. Hmmm, I may need to look at getting a microphone on here somehow and streaming audio with gstreamer as well.
Raspberry-Hardware
Raspberry Pi Model B
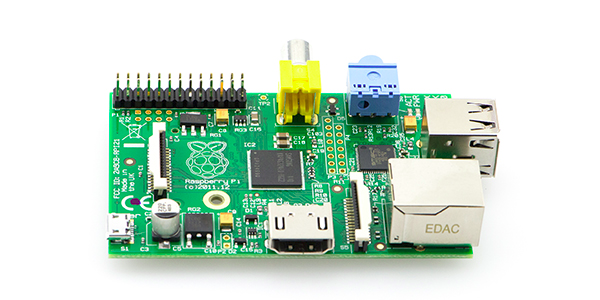
Spezifikationen
- Broadcom BCM2835 SoC
700 MHz ARM1176JZF-S core CPU - Broadcom VideoCore IV GPU
- 512 MByte RAM
- 2 x USB 2.0 Ports
- Videoausgang über Composite (PAL und NTSC), HDMI oder Raw LCD (DSI)
Audioausgang über 3,5mm Klinkenbuchse oder Audio über HDMI - Speicher: SD/MMC/SDIO
- 10/100 Ethernet (RJ45)
- Low-Level-I/O:
8 x GPIO - UART
- I2C-Bus
- SPI-Bus mit 2 Chip-Select-Anschlüssen
- +3.3 V
+5 V
GND - Leistungsbedarf: 5 V @ 700 mA über MicroUSB-Anschluss oder GPIO-Header
- Unterstützte Betriebssysteme: Debian GNU/Linux, Fedory, ArchLinux, RISC OS und weitere!
Raspi Zero W
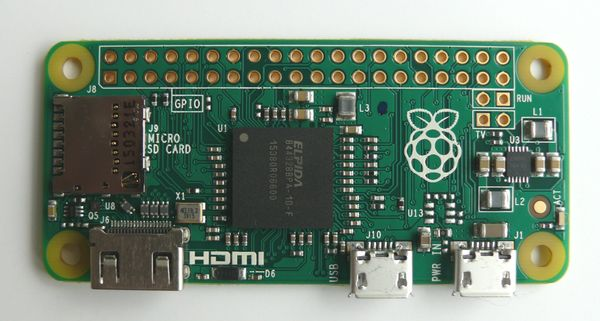
Der Raspberry Pi Zero ist ein 5$-Computer im Mini-Format. Er ist im Grunde ein verbesserter Raspberry Pi A+ mit mehr CPU Leistung, mehr RAM und zugleich weniger Stromverbrauch. Meist ist er nicht einzeln, sondern nur im Set mit einem MiniHDMI-auf-HDMI-Adapter, Micro-USB-auf-USB-A-Adapter und einer selber anzulötenden Stiftleiste erhältlich. Der Zero W unterscheidet sich vom normalen Zero, dass er einen integrierten und kombinierten WLAN- und Bluetooth-Adapter hat. Der Zero WH hat eine aufgelötete GPIO-Pin-Leiste.
Raspberry Pi Zero: ohne WLAN, Bluetooth und aufgelötete GPIO-Pin-Leiste
Raspberry Pi Zero W: mit WLAN und Bluetooth
Raspberry Pi Zero WH: mit WLAN und aufgelöteter GPIO-Pin-Leiste
Der Raspberry Pi Zero ist standardmäßig bereits auf 1.000 MHz getaktet. Viel mehr geht nicht, weil noch der alte SoC verbaut ist, der bereits beim Raspberry Pi 1 verbaut wurde. Wer mehr Performance braucht sollte lieber zu einem Raspberry Pi 2 oder 3 greifen.
In der Praxis macht der Raspberry Pi Zero nur dann Sinn, wenn man wenig Raum hat und mit den begrenzten Anschlussmöglichkeiten, wie beim Raspberry Pi A oder A+ auskommt. Ansonsten entsteht ein komplexes und unübersichtliches Gewirr aus Raspberry Pi Zero, USB-Netzteil, HDMI- und USB-Adapterkabeln, USB-Hub mit Netzteil, WLAN-Adapter-Stick, sowie Tastatur, Maus und Bildschirm.
Architektur
System-on-Chip mit BCM2835 von Broadcom
Prozessor mit ARM11-Kern und 1 GHz (ARMv6)
Arbeitsspeicher mit 512 MByte LPDDR2-SDRAM
Formfaktor: 65 mm x 30 mm x 5 mm
Schnittstellen
Micro-SD-Kartenslot (steckbar ohne Einrastung)
Mini-HDMI-Ausgang mit einer Auflösung von 1080p60
2 x Micro-USB-Anschlüsse jeweils einer für Stromversorgung und USB
GPIO-Header mit 40-Pins
Composite-Video-Header
CSI für Camera-Port (nur Raspberry Pi Zero 1.3)
Energiebedarf
Der Energiebedarf wird mit 0,5 bis 0,7 Watt und 0,1 bis 0,14 Ampere bei 5,09 Volt angegeben. Im Idle liegt der Strombedarf bei gerade mal 0,116 Ampere.
Raspberry Pi Zero
Verbaut ist ein Single-Core-SoC BCM2835 von Broadcom, der mit 1 GHz getaktet ist und über einen Arbeitsspeicher von 512 MByte verfügt. Als Systemlaufwerk steht ein Slot für eine MicroSD-Karte bereit. Die Schnittstellen sind ein Mini-HDMi-Anschluss für die Bildschirmausgabe, ein OTG-fähiger Micro-USB-Anschluss und ein Mikro-USB-Anschluss für das Netzteil. Ansonsten existieren noch Lötpunkte für einen 40-Pin-GPIO-Verbinder und Composite-Videoausgang.
Der Raspberry Pi Zero in der Version 1.3 hat zusätzlich noch die Schnittstelle CSI für einen Camera-Port, wie ihn die größeren Modelle aufweisen.
Raspberry Pi Zero W
Genau wie beim Zero (ohne Zusatz) ist beim Zero W der Single-Core-SoC BCM2835 von Broadcom mit 512 MByte Arbeitsspeicher verbaut, der ebenfalls mit 1 GHz getaktet ist. Neu ist der Wireless-Chip BCM43438 für WLAN mit 802.11 b/g/n und Bluetooth 4.1 Low-Energy (BLE). Das ist der gleiche Chip wie beim Raspberry Pi 3 B.
Raspberry Pi Zero WH
Die Ausstattung des Raspberry Pi Zero WH entspricht dem Raspberry Pi Zero W. Der wesentliche Unterschied beim WH-Modell ist, dass die GPIO-Pin-Leiste aufgelötet ist. Das treibt natürlich die Kosten bei der Produktion hoch, weshalb der Raspberry Pi Zero WH etwas teurer ist. Dafür kann man gleich loslegen, ohne die Pinleiste auflöten zu müssen.
Erstkonfiguration per SSH beim Raspberry Pi Zero W und WH
Solange WLAN nicht eingerichtet ist, scheidet die Erstkonfiguration per SSH aus. Dafür gibt es folgende Lösung:
SSH aktivieren: Im boot-Verzeichnis muss sich eine leere Datei mit Namen "ssh" befinden. Beim ersten Booten wird SSH dauerhaft aktiviert.
WLAN konfigurieren: Im boot-Verzeichnis muss sich eine fertig konfigurierte wpa_supplicant.conf-Datei befinden. Beim Booten wird diese in das richtige Verzeichnis geschrieben.
Energieversorgung: Back-Powering
Wenn man aus einem stabilisierten oder geregelten Netzteil eine stabile und saubere Spannung (geringe Restwelligkeit) von 5 Volt zur Verfügung hat, dann kann man den Raspberry Pi Zero auch über den GPIO-5V-Pin mit Strom versorgen.
Man sollte dann aber schon wissen was man tut, weil im Zero keine Polyfuse (Sicherung) verbaut ist. Das bedeutet, dass die angelegte Spannung nicht nur den SoC, sondern auch die USB-Geräte versorgt. Unter Umständen geht nicht nur der SoC kaputt, sondern auch die USB-Geräte, wenn man hier Mist baut.
Raspberry P4 4G

Name der Produktfamilie Raspberry Pi
Produktart : Raspberry Pi 4
Frequenz : 1.5 GHz
Speichergrösse: 4 GB
Speicher-Typ : LPDDR4
Schnittstellen: Bluetooth,Ethernet,I²C.,MicroSD,SPI,UART,USB 2.0,USB 3.0,USB-C,Wi-Fi,microHDMI,
Konnektivität, drahtlos: Bluetooth,Wi-Fi
Versorgungsspannung: min. 5 V
Versorgungsspannung :max. 5.1 V
Länge 85 mm
Breite 56 mm
Höhe 17 mm
Gewicht 66 g
| Family | Model | SoC | Memory | Form Factor | Ethernet | Wireless | GPIO | Released | Discontinued |
|---|---|---|---|---|---|---|---|---|---|
| Raspberry Pi 4 | B | BCM2711 | 1 GB | Standard[lower-alpha 1] | Yes[lower-alpha 7] | Yes[lower-alpha 5] | 40-pin | 2019[3] | Yes (2020)[4] |
| 2021[5] | No | ||||||||
| 2 GB | 2019[3] | ||||||||
| 4 GB | |||||||||
| 8 GB | 2020 | ||||||||
| 400 | 4 GB | Keyboard |
Raspi Zero 2W
Specification
1GHz quad-core 64-bit Arm Cortex-A53 CPU
512MB SDRAM
2.4GHz 802.11 b/g/n wireless LAN
Bluetooth 4.2, Bluetooth Low Energy (BLE), onboard antenna
Mini HDMI® port and micro USB On-The-Go (OTG) port
microSD card slot
CSI-2 camera connector
HAT-compatible 40-pin header footprint (unpopulated)
H.264, MPEG-4 decode (1080p30); H.264 encode (1080p30)
OpenGL ES 1.1, 2.0 graphics
Micro USB power
Composite video and reset pins via solder test points
65mm x 30mm

Orange PI 2
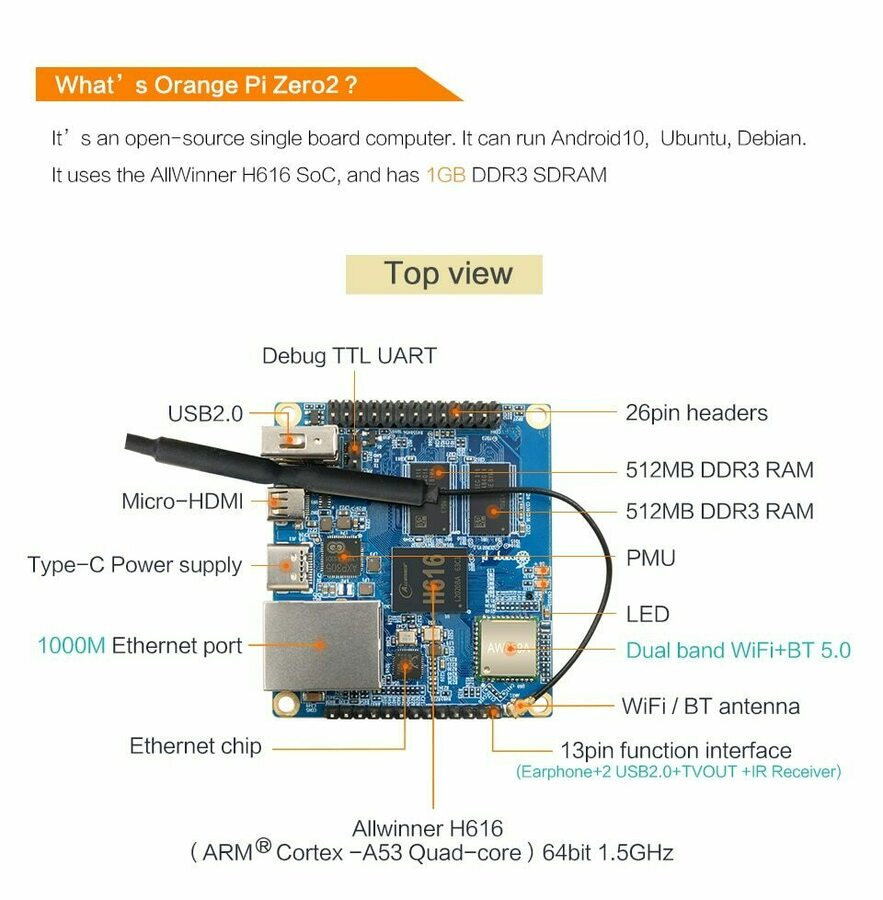
Orange PI Zero 2
Orange Pi Zero 2 mit 1 GB SDRAM, Allwinner H616 64-Bit Hochleistungs-Quad-Core Cortex-A53 Prozessor unterstützt 1000 M Ethernet-Port und WLAN, BT5.0, Android10, Ubuntu, Debian
CPU: Allwinner H616 64-Bit Hochleistungs-Quad-Core Cortex-A53 Prozessor
GPU: Mali G31 MP2 unterstützt OpenGL ES 1.0/2.0/3.2, OpenCL 2.0.
Video-Dekodierung: H.265 Main10@L5.1 Decoder bis zu 4K @ 60fps oder 6K @ 30fps VP9 Profile 2 Decoder bis zu 4K @ 60fps AVS2 JiZhun 10bit Decoder bis zu 4K @ 60fps H.264 BP/MP/HP @ P@ L4.2 Decoder oder bis zu 4K @30fps
Videokodierung: H.264 BP/MP/HP Encoder bis zu 4K @ 25fps oder 1080p @ 60fps JPEG-Snapshot-Leistung von 1080p @ 60fps
Speicher (SDRAM): 1 GB (gemeinsam mit GPU).
Integrierter Speicher: TF-Kartensteckplatz, 2 MB SPI Flash
Onboard-Netzwerk: unterstützt 1000 m/100 m/10 m Ethernet.
Onboard WiFi + BT: AW859A Chip unterstützt IEEE 802.11 a/b/g/n/ac, unterstützt BT5.0
Video-Ausgänge: Micro-HDMI 2.0a bis zu 4K @ 60fps TV CVBS-Ausgang, unterstützt PAL/NTSC (über 13-polige Schnittstellenplatte).
Audio-Ausgang: Micro-HDMI, 3,5 mm Audioanschluss (über 13-polige Schnittstelle).
Stromversorgung: Typ-C-Schnittstelle, 5 V, 2 A Eingang.
USB-2.0-Anschlüsse: 3 x USB-2.0-Host (zwei davon sind über 13-polige Schnittstelle).
Low-Level-Peripheriegeräte: 26-poliger Header mit I2C, SPI, UART und mehreren GPIO-Ports, 13-poliger Header mit 2 x USB-Host, IR-Pin, TV-Out, Audio (kein Mikrofon) und 3 GPIO-Ports.
Debug serieller Anschluss: UART-TX, UART-RX und GND.
LED: Power-LED & Status-LED.
IR-Empfänger: unterstützt IR-Fernbedienung (über 13-polige Schnittstelle).
Unterstützte Betriebssysteme: Android 10, Ubuntu, Debian.
Maße: 53 x 60 mm.
Gewicht: 30 g.
Banana Pi BPI-M2 Berry
Wiki
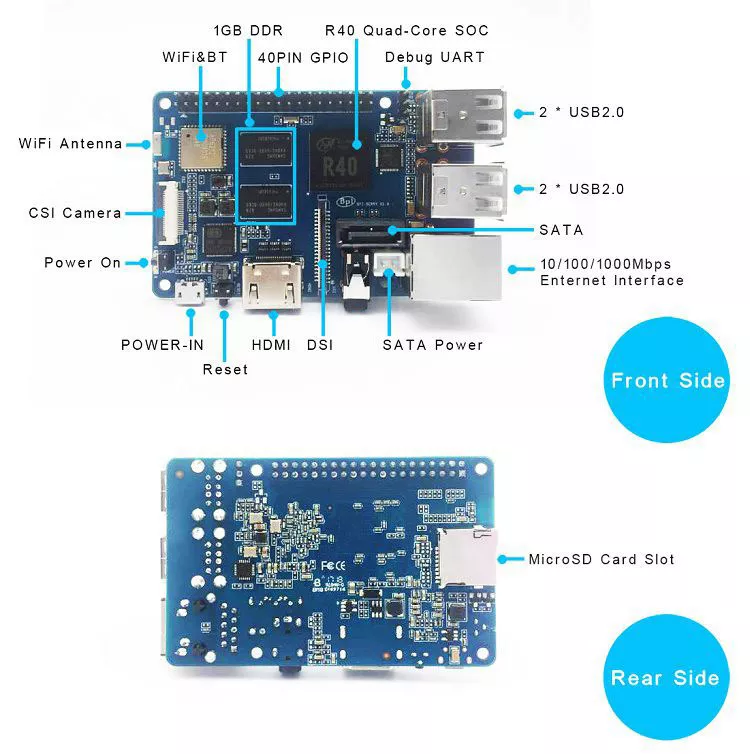
| HardWare Specification of Banana pi BPI-M2 Berry | |||
| Soc | Allwinner A40i/R40/V40 | ||
| CPU | quad-core cortex -A7,the most power efficient CPU core ARM's ever development | ||
| GPU | dual-core MALI-400 MP2 and runs at 500MHz, capable of 1.1 Gpixel/s throughput. Graphics capabilities are slightly higher than the original Xbox’s level of performance. The GPU provides OpenGL ES 2.0, hardware-accelerated OpenVG, 1080p45 H.264 high-profile encode and decode. | ||
| SDRAM | 1GB DDR3 with 733MHz\(shared with GPU\) | ||
| SATA | suppoort SATA interface | ||
| GPIO | 40 Pins Header, 28×GPIO, some of which can be used for specific functions including UART, I2C, SPI, PWM, I2S. | ||
| On board Network | 10/100/1000Mbps Ethernet \(Realtek RTL8211E/D\) | ||
| Wifi Module | WiFi 802.11 b/g/n \(AP 6212 module on board\) | ||
| Bluetooth | BT4.0 | ||
| On board Storage | MicroSD \(TF\) card,No eMMC onboard | ||
| Display | 4-lane MIPI DSI display,or RGB panel or LVDS panel,TV-out on HDMI V1.4 | ||
| Video | Multi-format FHD video decoding, including Mpeg1/2, Mpeg4, H.263, H.264, etc H.264 decode up to 1080P60,support video encodeing:High-deinition\(HD\)H.264 video encoder is up to 1080P@45fps | ||
| Audio outputs | HDMI, analog audio \(via 3.5 mm TRRS jack\), I2S audio \(also potentially for audio input\) | ||
| Camera | A CSI input connector Camera:Supports 8-bit YUV422 CMOS sensor interface,Supports CCIR656 protocol for NTSC and PAL,Supports 5M pixel camera sensor ,Supports video capture solution up to 1080p@30fps | ||
| USB | 4 USB 2.0 host, 1 USB 2.0 OTG | ||
| Buttons | Reset button, Power button, U-boot button | ||
| Leds | Power status Led and RJ45 Led | ||
| IR | No onboard IR receiver | ||
| DC Power | 5V/2A with micro USB port | ||
| battery | No 3.7V lithium battery power support | ||
| Sizes | 85mmX56mm,same size as raspberry pi 3 | ||
| Weight | 40g | ||
Bananan Pi M2 Zero
PI BPI-M2 Zero
Hersteller Wiki: https://wiki.banana-pi.org/Banana_Pi_BPI-M2_ZERO
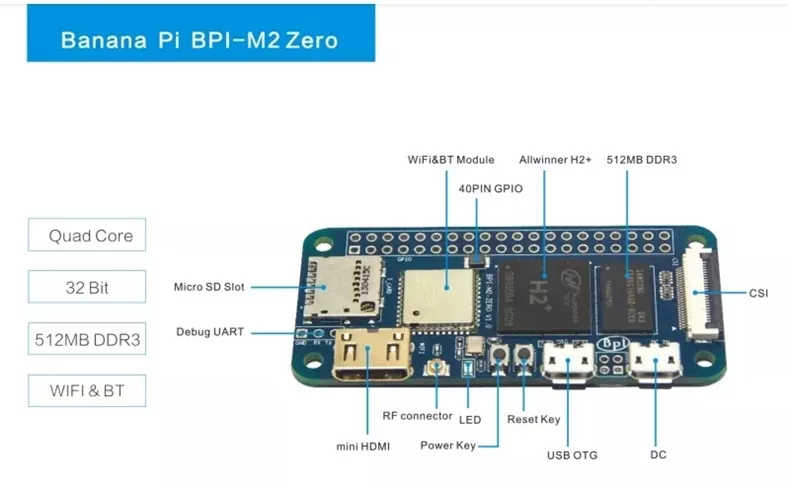
Hardware spec
| HardWare Specification of Banana pi BPI-P2 Zero VS BPI-M2 zero VS Raspberry Pi Zero W | |
| Module | Banana Pi BPI-M2 Zero |
| CPU | Allwinner H3/H2+ Quad-core Cortex-A7 H265/HEVC 1080P |
| GPU | Mali400MP2 GPU @600MHz,Supports OpenGL ES 2.0 |
| Memory \(SDRAM\) | 512M DDR3(shared with GPU) |
| Onboard Storage | TF card \(Max. 64GB\) |
| Onboard Network | NOPE (but can extension with PIN define) |
| PoE power | NOPE |
| Onboard flash | NOPE |
| Onboard WIFI | SDIO AP6212(option AP6181、AP6335) |
| Video decoding | 1080p@60fps,H.264 Video encoding 1080p@30fps,H.264 |
| Video input | A CSI input connector Camera |
| Video Outputs | mini HDMI 1.4,1080P@30fps, DHCP |
| Audio Output | Mini HDMI |
| Power Source | Micro USB with 5V/2A |
| USB 2.0 Ports | one USB 2.0 OTG |
| Buttons | Power Button, Reset Button |
| Low-level peripherals | 40 Pins Header,compatible with Raspberry Pi 3 |
| uart GPIO\(1x3\) pin | UART, ground |
| LED | Power led & Status led |
| IR | N/A |
| Supported OS | android linx |
| Product size | 65mm × 30mm |
| Weight | 15g |
Bananpi Pi M1
Banana Pi BPI-M1

Key Features
- Allwinner A20 Dual-core 1.0GHz CPU
- Mali-400 MP2 with Open GL ES 2.0/1.1.
- 1 GB DDR3 memory.
- 1x SATA interface.
- 1x Gigabit LAN
- 1x USB otg and 2x USB 2.0
- 1X MIC
- AV vide out
- HDMI out
- IR
- CSI camera interface
- DSI display interface
- 26 PIN gpio